MONAI 0.7 : tutorials : 3D セグメンテーション – UNet による 3D セグメンテーション (翻訳/解説)
翻訳 : (株)クラスキャット セールスインフォメーション
作成日時 : 11/07/2021 (0.7.0)
* 本ページは、MONAI の以下のドキュメントを翻訳した上で適宜、補足説明したものです:
* サンプルコードの動作確認はしておりますが、必要な場合には適宜、追加改変しています。
* ご自由にリンクを張って頂いてかまいませんが、sales-info@classcat.com までご一報いただけると嬉しいです。
クラスキャット 人工知能 研究開発支援サービス ★ 無料 Web セミナー開催中 ★
◆ クラスキャットは人工知能・テレワークに関する各種サービスを提供しております。お気軽にご相談ください :

- 人工知能研究開発支援
- 人工知能研修サービス(経営者層向けオンサイト研修)
- テクニカルコンサルティングサービス
- 実証実験(プロトタイプ構築)
- アプリケーションへの実装
- 人工知能研修サービス
- PoC(概念実証)を失敗させないための支援
- テレワーク & オンライン授業を支援
◆ 人工知能とビジネスをテーマに WEB セミナーを定期的に開催しています。スケジュール。
- お住まいの地域に関係なく Web ブラウザからご参加頂けます。事前登録 が必要ですのでご注意ください。
- ウェビナー運用には弊社製品「ClassCat® Webinar」を利用しています。
◆ お問合せ : 本件に関するお問い合わせ先は下記までお願いいたします。
| 株式会社クラスキャット セールス・マーケティング本部 セールス・インフォメーション |
| E-Mail:sales-info@classcat.com ; WebSite: https://www.classcat.com/ ; Facebook |
MONAI 0.7 : tutorials : 3D セグメンテーション – UNet による 3D セグメンテーション
このノートブックは合成データセットに基づく 3D セグメンテーションの end-to-end な訓練 & 評価サンプルです。サンプルは PyTorch Ignite プログラムで MONAI の幾つかの主要な機能を示します、特に医療ドメイン固有の変換とプロファイリング (ロギング, TensorBoard, MLFlow 等) のためのイベントハンドラを使用します。
環境のセットアップ
!python -c "import monai" || pip install -q "monai-weekly[ignite, nibabel, tensorboard, mlflow]"
インポートのセットアップ
# Copyright 2020 MONAI Consortium
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# http://www.apache.org/licenses/LICENSE-2.0
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import glob
import logging
import os
from pathlib import Path
import shutil
import sys
import tempfile
import nibabel as nib
import numpy as np
from monai.config import print_config
from monai.data import ArrayDataset, create_test_image_3d, decollate_batch
from monai.handlers import (
MeanDice,
MLFlowHandler,
StatsHandler,
TensorBoardImageHandler,
TensorBoardStatsHandler,
)
from monai.losses import DiceLoss
from monai.networks.nets import UNet
from monai.transforms import (
Activations,
AddChannel,
AsDiscrete,
Compose,
LoadImage,
RandSpatialCrop,
Resize,
ScaleIntensity,
EnsureType,
)
from monai.utils import first
import ignite
import torch
print_config()
データディレクトリのセットアップ
MONAI_DATA_DIRECTORY 環境変数でディレクトリを指定できます。これは結果をセーブしてダウンロードを再利用することを可能にします。指定されない場合、一時ディレクトリが使用されます。
directory = os.environ.get("MONAI_DATA_DIRECTORY")
root_dir = tempfile.mkdtemp() if directory is None else directory
print(root_dir)
/workspace/data/medical
ロギングのセットアップ
logging.basicConfig(stream=sys.stdout, level=logging.INFO)
デモデータのセットアップ
for i in range(40):
im, seg = create_test_image_3d(128, 128, 128, num_seg_classes=1)
n = nib.Nifti1Image(im, np.eye(4))
nib.save(n, os.path.join(root_dir, f"im{i}.nii.gz"))
n = nib.Nifti1Image(seg, np.eye(4))
nib.save(n, os.path.join(root_dir, f"seg{i}.nii.gz"))
images = sorted(glob.glob(os.path.join(root_dir, "im*.nii.gz")))
segs = sorted(glob.glob(os.path.join(root_dir, "seg*.nii.gz")))
変換, データセットのセットアップ
# Define transforms for image and segmentation
imtrans = Compose(
[
LoadImage(image_only=True),
ScaleIntensity(),
AddChannel(),
RandSpatialCrop((96, 96, 96), random_size=False),
EnsureType(),
]
)
segtrans = Compose(
[
LoadImage(image_only=True),
AddChannel(),
RandSpatialCrop((96, 96, 96), random_size=False),
EnsureType(),
]
)
# Define nifti dataset, dataloader
ds = ArrayDataset(images, imtrans, segs, segtrans)
loader = torch.utils.data.DataLoader(
ds, batch_size=10, num_workers=2, pin_memory=torch.cuda.is_available()
)
im, seg = first(loader)
print(im.shape, seg.shape)
torch.Size([10, 1, 96, 96, 96]) torch.Size([10, 1, 96, 96, 96])
モデル, 損失, Optimizer を作成する
# Create UNet, DiceLoss and Adam optimizer
device = torch.device("cuda:0")
net = UNet(
spatial_dims=3,
in_channels=1,
out_channels=1,
channels=(16, 32, 64, 128, 256),
strides=(2, 2, 2, 2),
num_res_units=2,
).to(device)
loss = DiceLoss(sigmoid=True)
lr = 1e-3
opt = torch.optim.Adam(net.parameters(), lr)
ignite を使用して supervised_trainer を作成する
# Create trainer
trainer = ignite.engine.create_supervised_trainer(
net, opt, loss, device, False
)
チェックポインティングとロギングのためのイベントハンドラのセットアップ
# optional section for checkpoint and tensorboard logging
# adding checkpoint handler to save models (network
# params and optimizer stats) during training
log_dir = os.path.join(root_dir, "logs")
checkpoint_handler = ignite.handlers.ModelCheckpoint(
log_dir, "net", n_saved=10, require_empty=False
)
trainer.add_event_handler(
event_name=ignite.engine.Events.EPOCH_COMPLETED,
handler=checkpoint_handler,
to_save={"net": net, "opt": opt},
)
# StatsHandler prints loss at every iteration
# user can also customize print functions and can use output_transform to convert
# engine.state.output if it's not a loss value
train_stats_handler = StatsHandler(name="trainer", output_transform=lambda x: x)
train_stats_handler.attach(trainer)
# TensorBoardStatsHandler plots loss at every iteration
train_tensorboard_stats_handler = TensorBoardStatsHandler(log_dir=log_dir, output_transform=lambda x: x)
train_tensorboard_stats_handler.attach(trainer)
# MLFlowHandler plots loss at every iteration on MLFlow web UI
mlflow_dir = os.path.join(log_dir, "mlruns")
train_mlflow_handler = MLFlowHandler(tracking_uri=Path(mlflow_dir).as_uri(), output_transform=lambda x: x)
train_mlflow_handler.attach(trainer)
N エポック毎の検証の追加
# optional section for model validation during training
validation_every_n_epochs = 1
# Set parameters for validation
metric_name = "Mean_Dice"
# add evaluation metric to the evaluator engine
val_metrics = {metric_name: MeanDice()}
post_pred = Compose(
[EnsureType(), Activations(sigmoid=True), AsDiscrete(threshold_values=True)]
)
post_label = Compose([EnsureType(), AsDiscrete(threshold_values=True)])
# Ignite evaluator expects batch=(img, seg) and
# returns output=(y_pred, y) at every iteration,
# user can add output_transform to return other values
evaluator = ignite.engine.create_supervised_evaluator(
net,
val_metrics,
device,
True,
output_transform=lambda x, y, y_pred: (
[post_pred(i) for i in decollate_batch(y_pred)],
[post_label(i) for i in decollate_batch(y)]
),
)
# create a validation data loader
val_imtrans = Compose(
[
LoadImage(image_only=True),
ScaleIntensity(),
AddChannel(),
Resize((96, 96, 96)),
EnsureType(),
]
)
val_segtrans = Compose(
[
LoadImage(image_only=True),
AddChannel(),
Resize((96, 96, 96)),
EnsureType(),
]
)
val_ds = ArrayDataset(images[21:], val_imtrans, segs[21:], val_segtrans)
val_loader = torch.utils.data.DataLoader(
val_ds, batch_size=5, num_workers=8, pin_memory=torch.cuda.is_available()
)
@trainer.on(
ignite.engine.Events.EPOCH_COMPLETED(every=validation_every_n_epochs)
)
def run_validation(engine):
evaluator.run(val_loader)
# Add stats event handler to print validation stats via evaluator
val_stats_handler = StatsHandler(
name="evaluator",
# no need to print loss value, so disable per iteration output
output_transform=lambda x: None,
# fetch global epoch number from trainer
global_epoch_transform=lambda x: trainer.state.epoch,
)
val_stats_handler.attach(evaluator)
# add handler to record metrics to TensorBoard at every validation epoch
val_tensorboard_stats_handler = TensorBoardStatsHandler(
log_dir=log_dir,
# no need to plot loss value, so disable per iteration output
output_transform=lambda x: None,
# fetch global epoch number from trainer
global_epoch_transform=lambda x: trainer.state.epoch,
)
val_tensorboard_stats_handler.attach(evaluator)
# add handler to record metrics to MLFlow at every validation epoch
val_mlflow_handler = MLFlowHandler(
tracking_uri=Path(mlflow_dir).as_uri(),
# no need to plot loss value, so disable per iteration output
output_transform=lambda x: None,
# fetch global epoch number from trainer
global_epoch_transform=lambda x: trainer.state.epoch,
)
val_mlflow_handler.attach(evaluator)
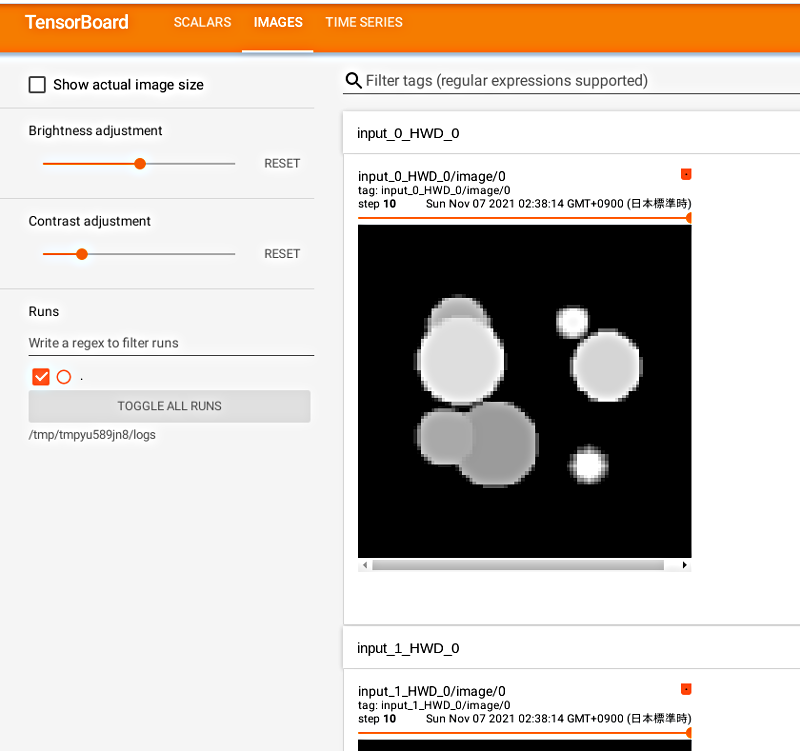
# add handler to draw the first image and the corresponding
# label and model output in the last batch
# here we draw the 3D output as GIF format along Depth
# axis, at every validation epoch
val_tensorboard_image_handler = TensorBoardImageHandler(
log_dir=log_dir,
batch_transform=lambda batch: (batch[0], batch[1]),
output_transform=lambda output: output[0],
global_iter_transform=lambda x: trainer.state.epoch,
)
evaluator.add_event_handler(
event_name=ignite.engine.Events.EPOCH_COMPLETED,
handler=val_tensorboard_image_handler,
)
訓練ループの実行
# create a training data loader
train_ds = ArrayDataset(images[:20], imtrans, segs[:20], segtrans)
train_loader = torch.utils.data.DataLoader(
train_ds,
batch_size=5,
shuffle=True,
num_workers=8,
pin_memory=torch.cuda.is_available(),
)
max_epochs = 10
state = trainer.run(train_loader, max_epochs)
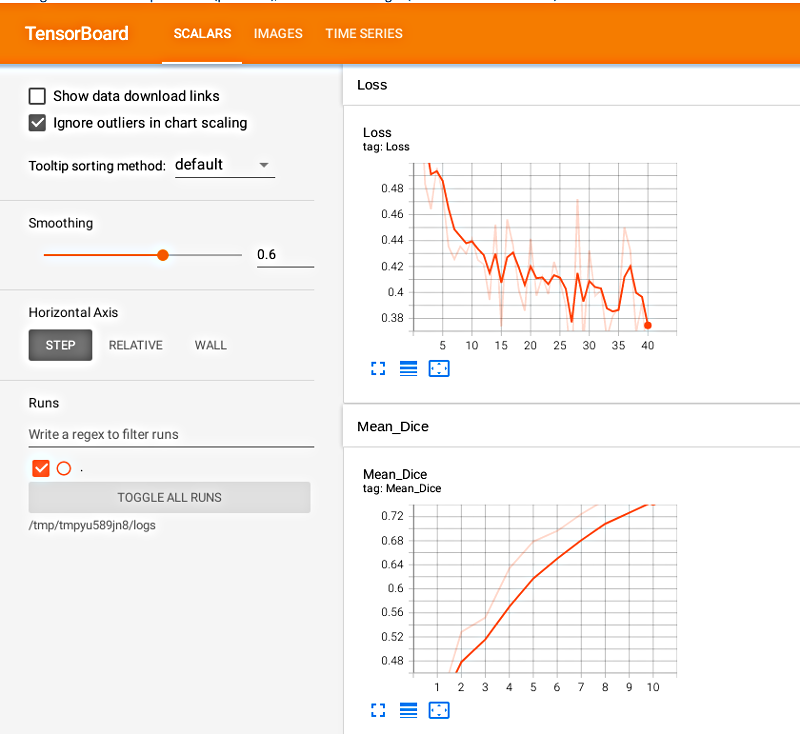
Tensorboard ログの可視化
%load_ext tensorboard
%tensorboard --logdir=log_dir
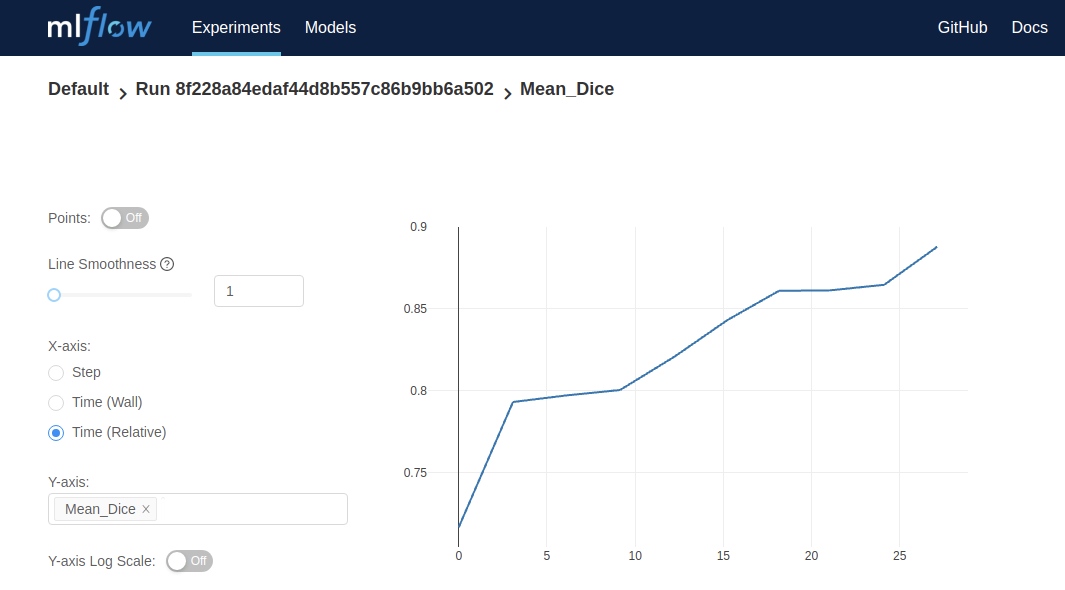
MLFlow で訓練ステータスを可視化する
mlflow は IPython コンポーネントではないので、log_dir に切り替えて MLFlow UI を起動するためにコマンド mlflow ui を実行してください。
MLFlow UI で予想される訓練曲線です :
データディレクトリのクリーンアップ
一時ディレクトリが使用された場合ディレクトリを削除します。
if directory is None:
shutil.rmtree(root_dir)
以上